"README.md" did not exist on "380386f797239f68f08365580e4141d7ccaecdb8"

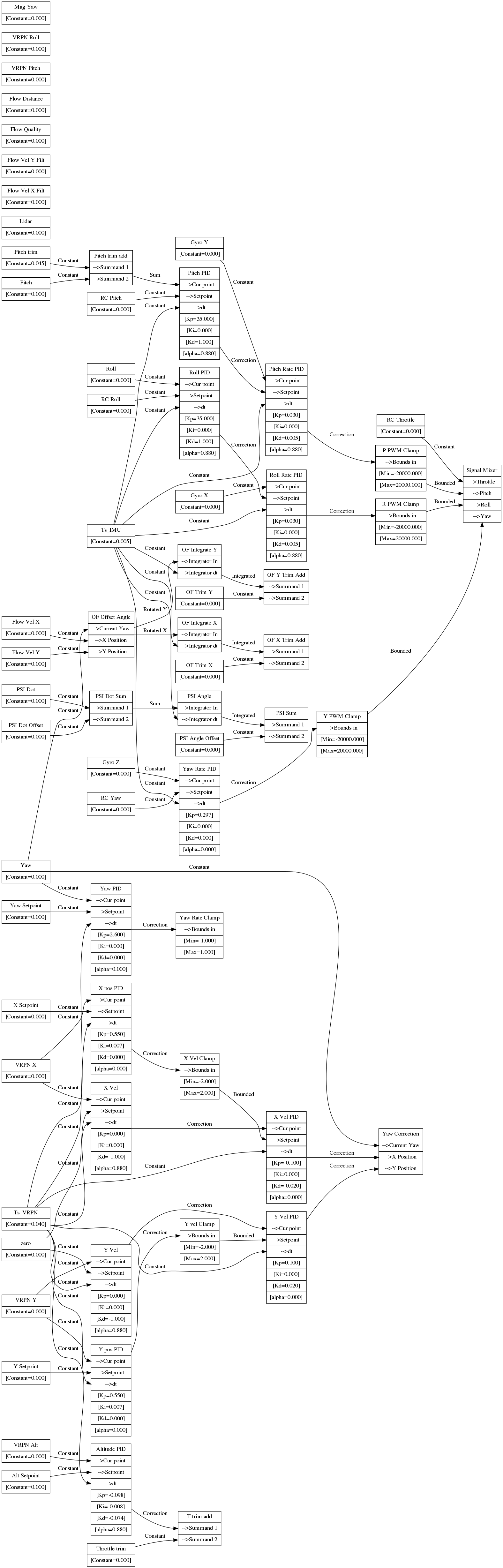
Added yaw rate clamp.
Showing
- quad/src/gen_diagram/network.dot 25 additions, 16 deletionsquad/src/gen_diagram/network.dot
- quad/src/gen_diagram/network.png 0 additions, 0 deletionsquad/src/gen_diagram/network.png
- quad/src/quad_app/control_algorithm.c 13 additions, 6 deletionsquad/src/quad_app/control_algorithm.c
- quad/src/quad_app/type_def.h 1 addition, 0 deletionsquad/src/quad_app/type_def.h
{kind=link}
{kind=link}

| W: | H:
| W: | H: