-
- Downloads
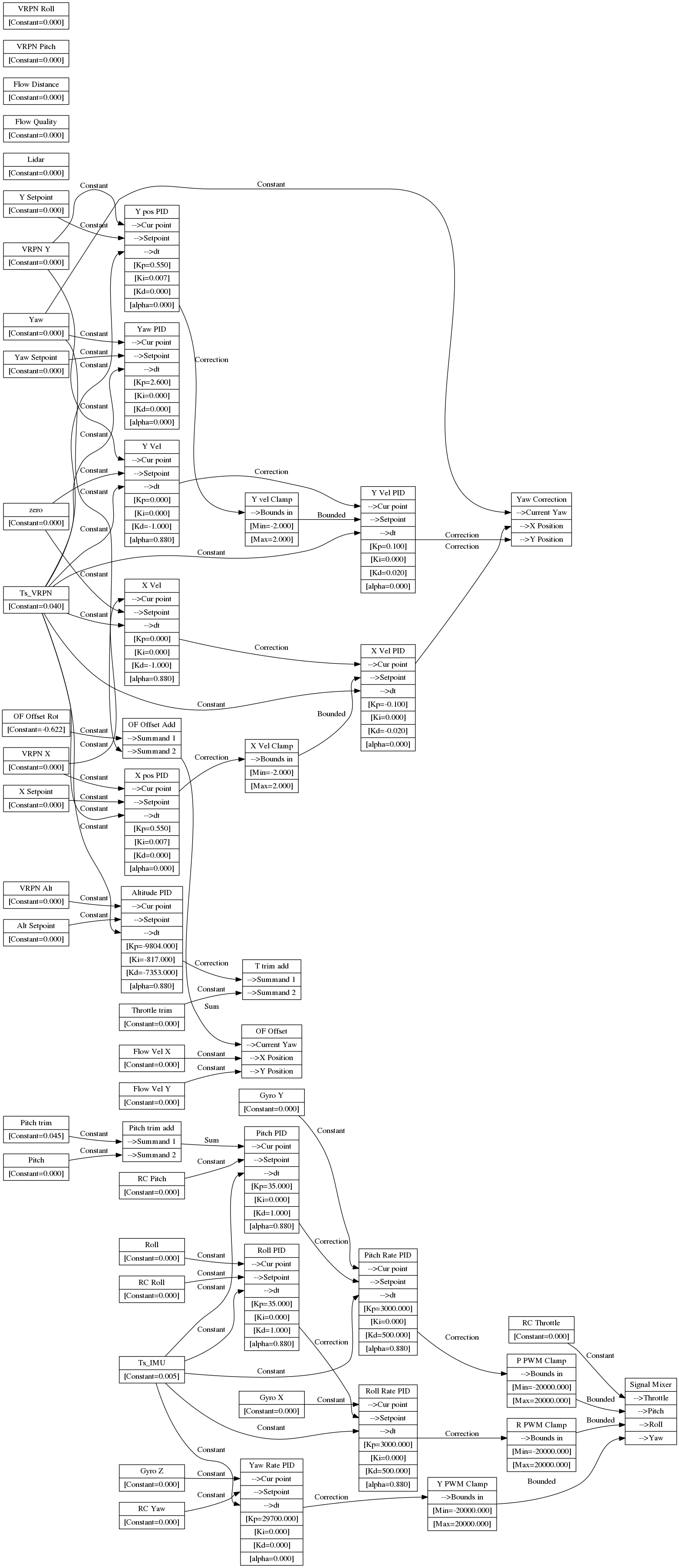
Added rotation correction for optical flow. Uses both the static offset and the quad's yaw.
Showing
- quad/src/gen_diagram/network.dot 19 additions, 6 deletionsquad/src/gen_diagram/network.dot
- quad/src/gen_diagram/network.png 0 additions, 0 deletionsquad/src/gen_diagram/network.png
- quad/src/quad_app/control_algorithm.c 15 additions, 0 deletionsquad/src/quad_app/control_algorithm.c
- quad/src/quad_app/log_data.c 2 additions, 0 deletionsquad/src/quad_app/log_data.c
- quad/src/quad_app/type_def.h 3 additions, 0 deletionsquad/src/quad_app/type_def.h
{kind=link}
{kind=link}

| W: | H:
| W: | H: