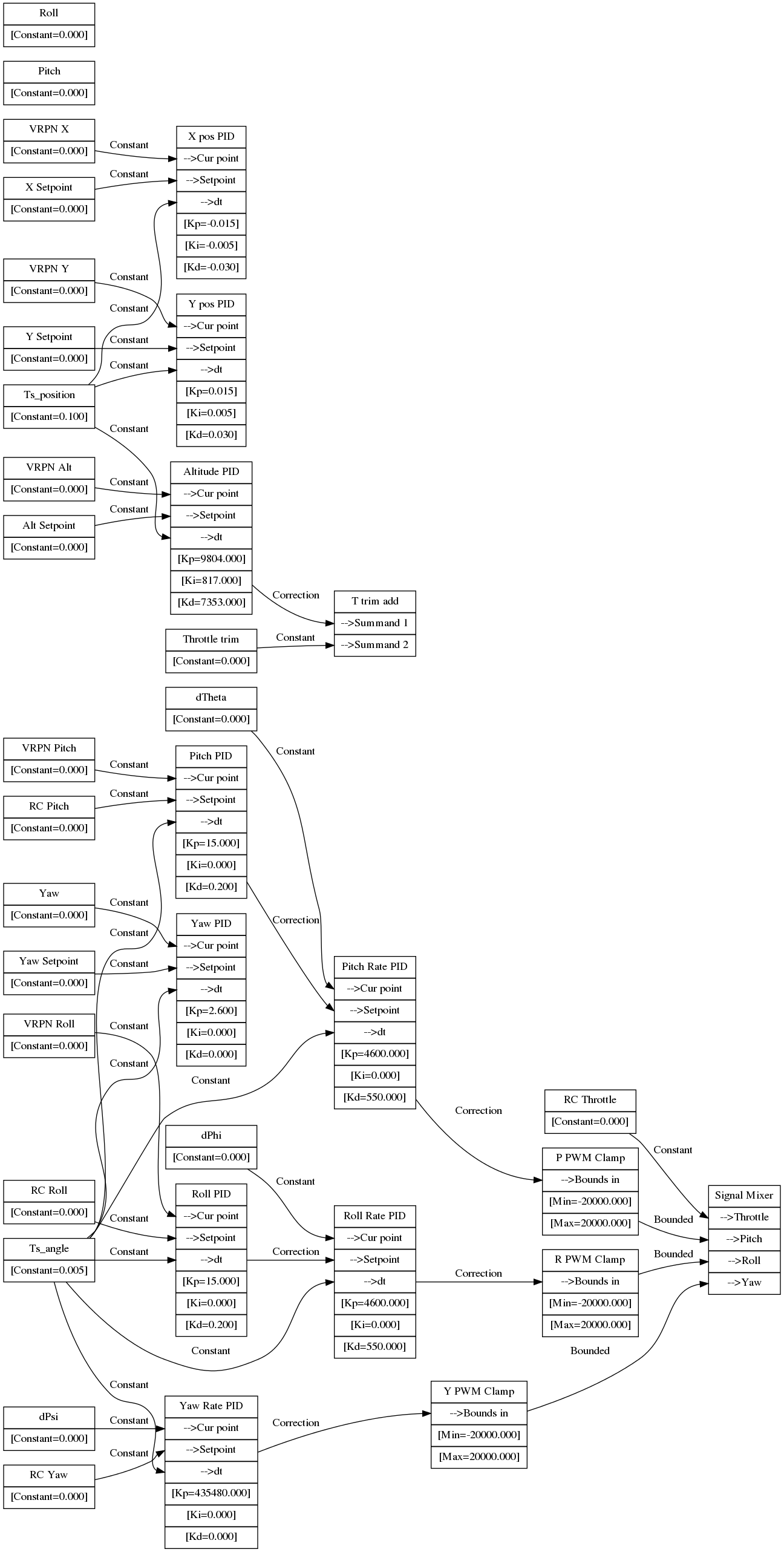
Set VRPN as source for roll/pitch.
Showing
- quad/sw/modular_quad_pid/gen_diagram/gen_diagram 0 additions, 0 deletionsquad/sw/modular_quad_pid/gen_diagram/gen_diagram
- quad/sw/modular_quad_pid/gen_diagram/network.dot 8 additions, 4 deletionsquad/sw/modular_quad_pid/gen_diagram/network.dot
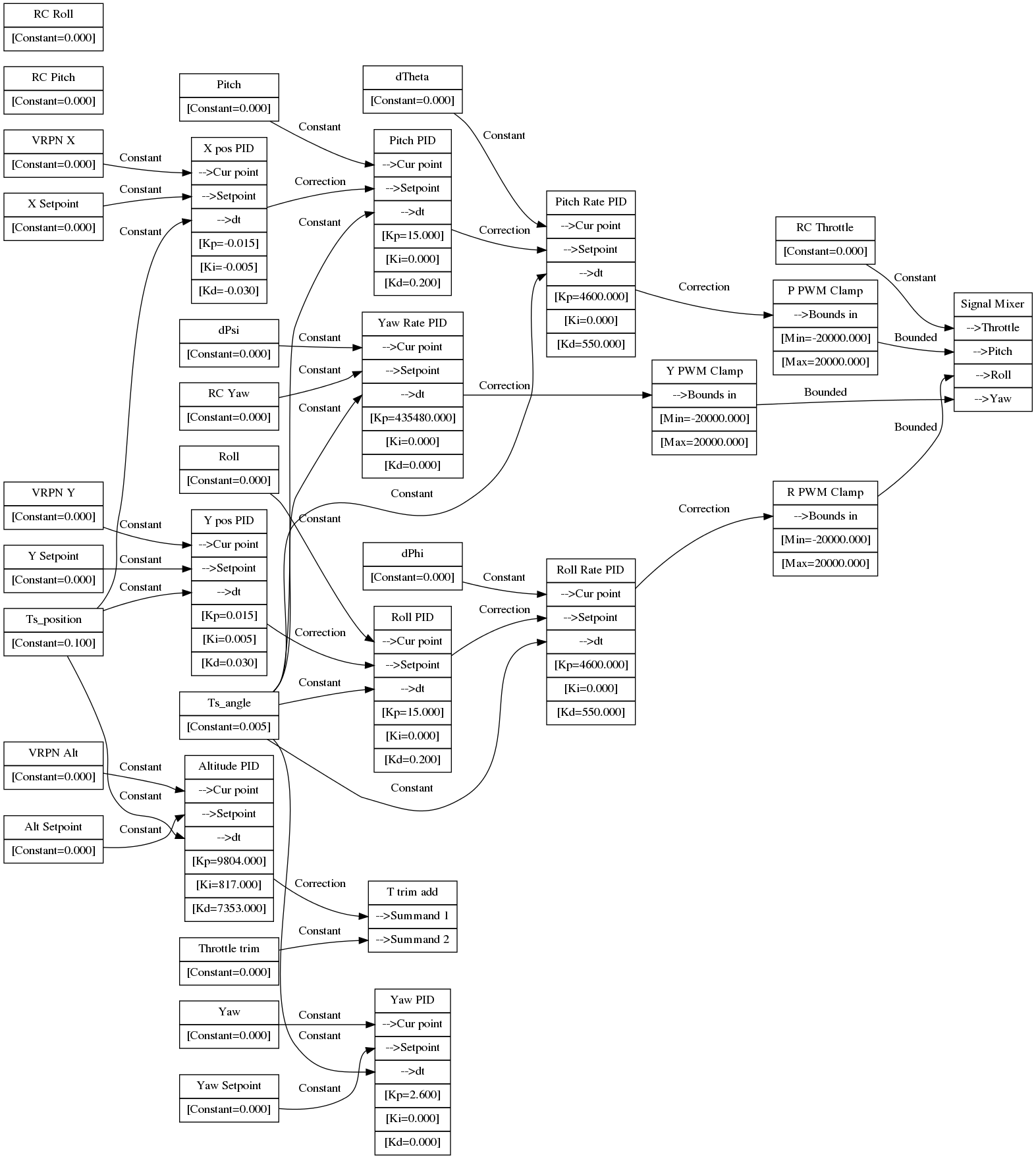
- quad/sw/modular_quad_pid/gen_diagram/network.png 0 additions, 0 deletionsquad/sw/modular_quad_pid/gen_diagram/network.png
- quad/sw/modular_quad_pid/src/control_algorithm.c 6 additions, 2 deletionsquad/sw/modular_quad_pid/src/control_algorithm.c
- quad/sw/modular_quad_pid/src/type_def.h 1 addition, 0 deletionsquad/sw/modular_quad_pid/src/type_def.h
No preview for this file type
{kind=link}
{kind=link}
| W: | H:
| W: | H: