-
- Downloads
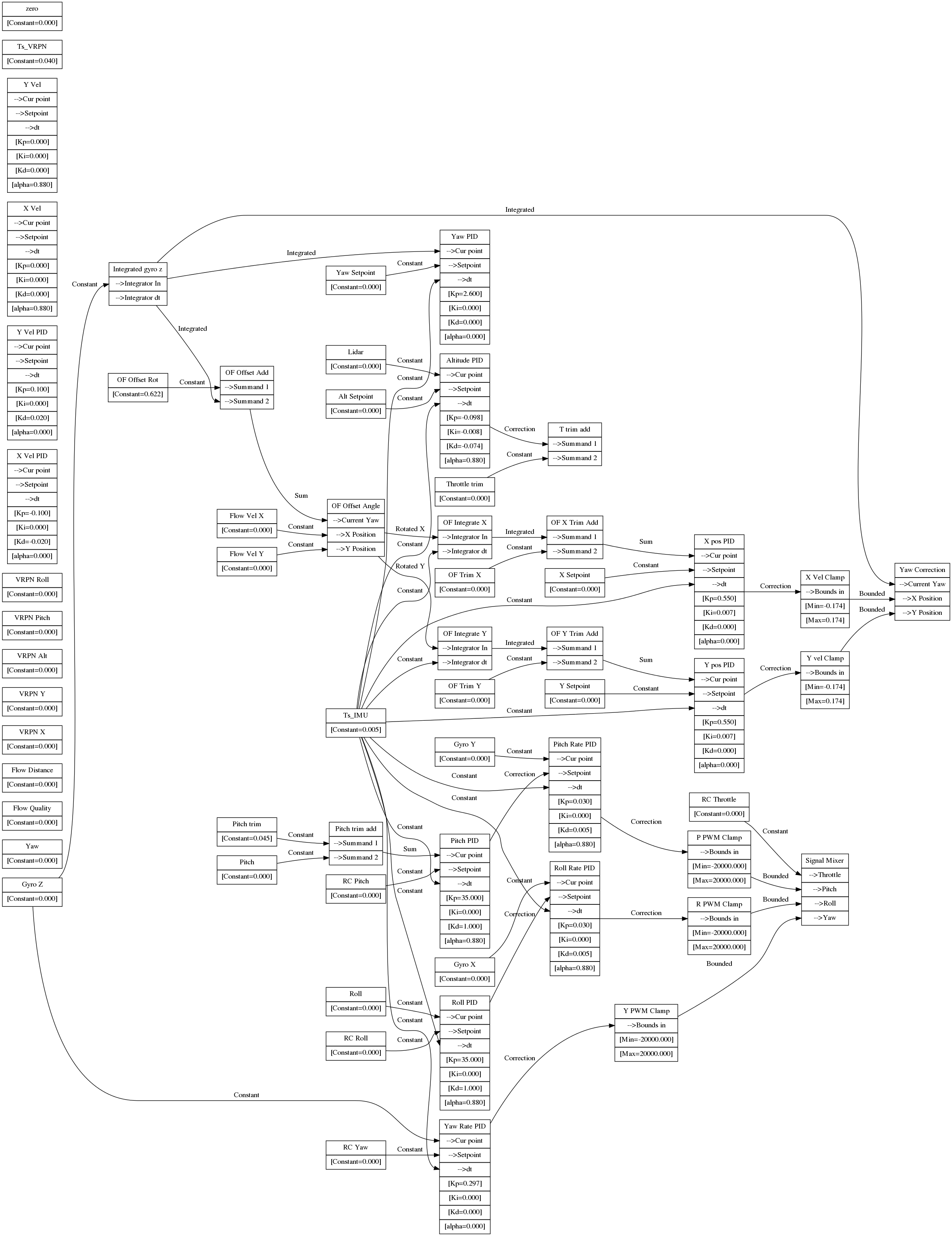
Removing optical flow constant offset, since it has been remounted.
Showing
- quad/src/gen_diagram/network.dot 5 additions, 11 deletionsquad/src/gen_diagram/network.dot
- quad/src/gen_diagram/network.png 0 additions, 0 deletionsquad/src/gen_diagram/network.png
- quad/src/quad_app/control_algorithm.c 2 additions, 8 deletionsquad/src/quad_app/control_algorithm.c
- quad/src/quad_app/type_def.h 0 additions, 2 deletionsquad/src/quad_app/type_def.h
{kind=link}
{kind=link}
| W: | H:

| W: | H: