Merge branch 'master' of https://git.ece.iastate.edu/danc/MicroCART_17-18
No related branches found
No related tags found
Showing
- quad/Makefile 5 additions, 0 deletionsquad/Makefile
- quad/src/gen_diagram/Makefile 4 additions, 7 deletionsquad/src/gen_diagram/Makefile
- quad/src/gen_diagram/README.md 3 additions, 8 deletionsquad/src/gen_diagram/README.md
- quad/src/gen_diagram/create_png.sh 1 addition, 4 deletionsquad/src/gen_diagram/create_png.sh
- quad/src/gen_diagram/gen_diagram 0 additions, 0 deletionsquad/src/gen_diagram/gen_diagram
- quad/src/gen_diagram/generate.c 1 addition, 14 deletionsquad/src/gen_diagram/generate.c
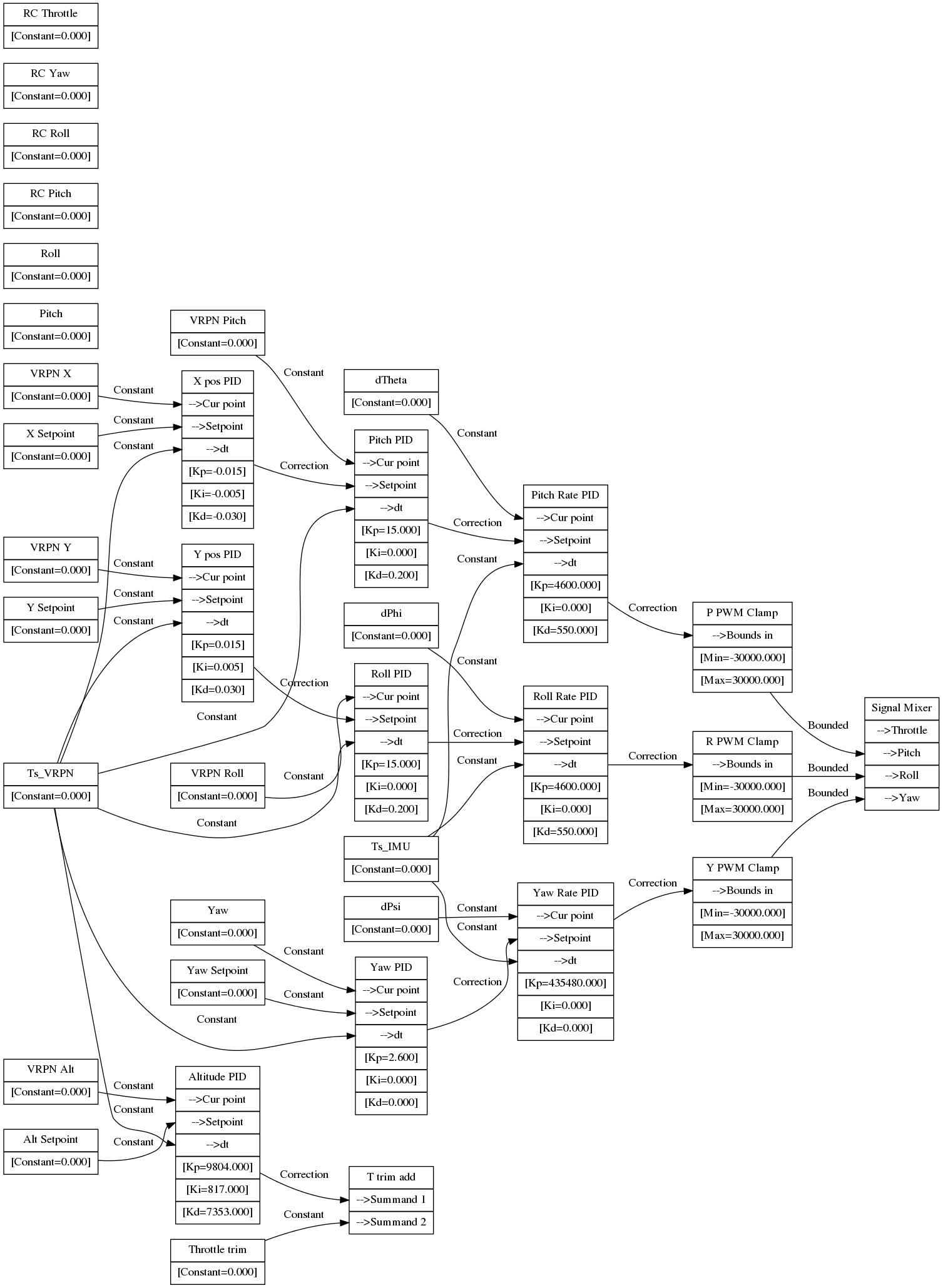
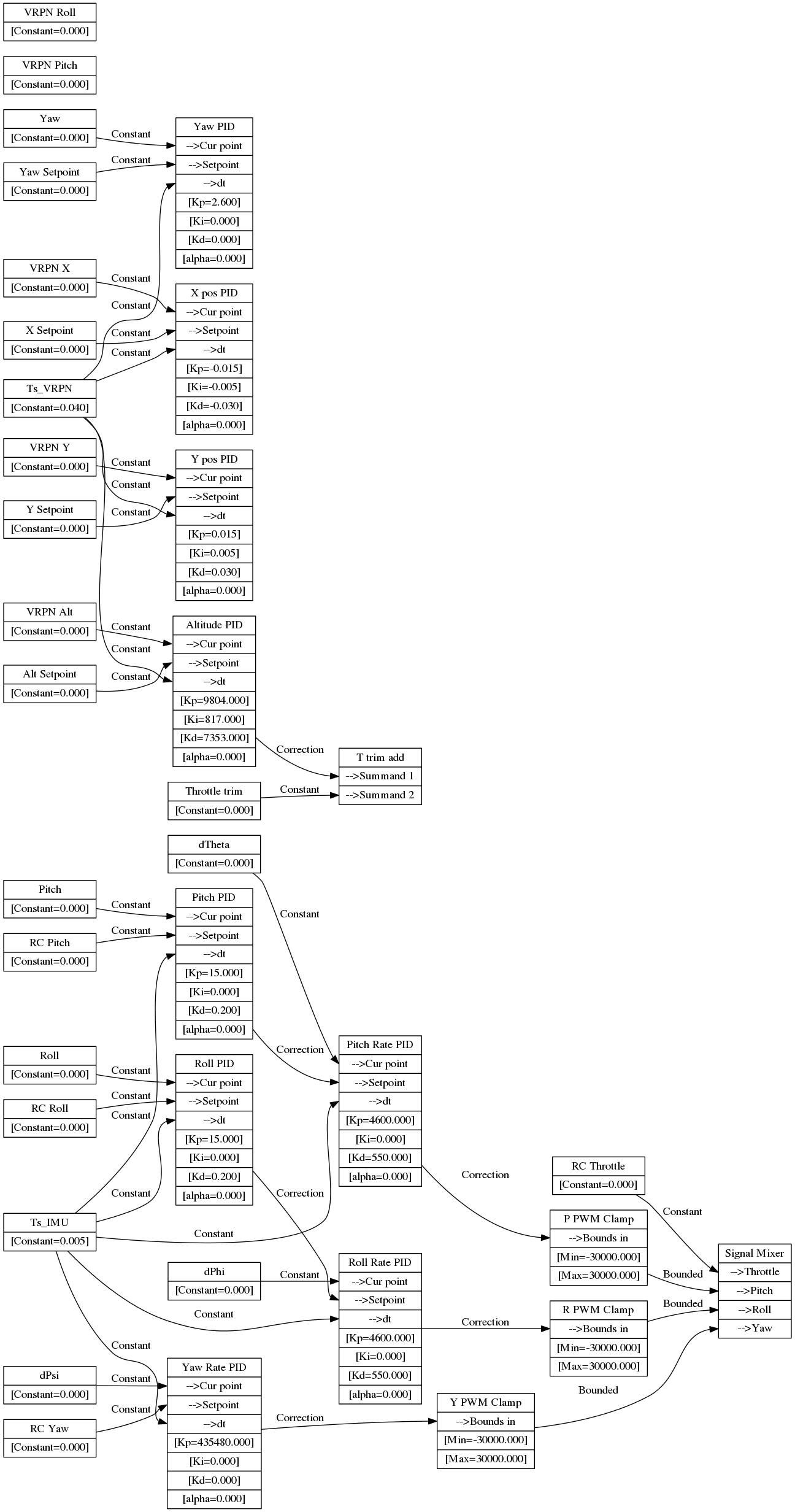
- quad/src/gen_diagram/network.dot 19 additions, 18 deletionsquad/src/gen_diagram/network.dot
- quad/src/gen_diagram/network.png 0 additions, 0 deletionsquad/src/gen_diagram/network.png
quad/src/gen_diagram/gen_diagram
deleted
100755 → 0
File deleted
{kind=link}
{kind=link}
| W: | H:
| W: | H: