-
- Downloads
Added define for USE_LIDAR. Lidar is still polled and the node is updated, but...
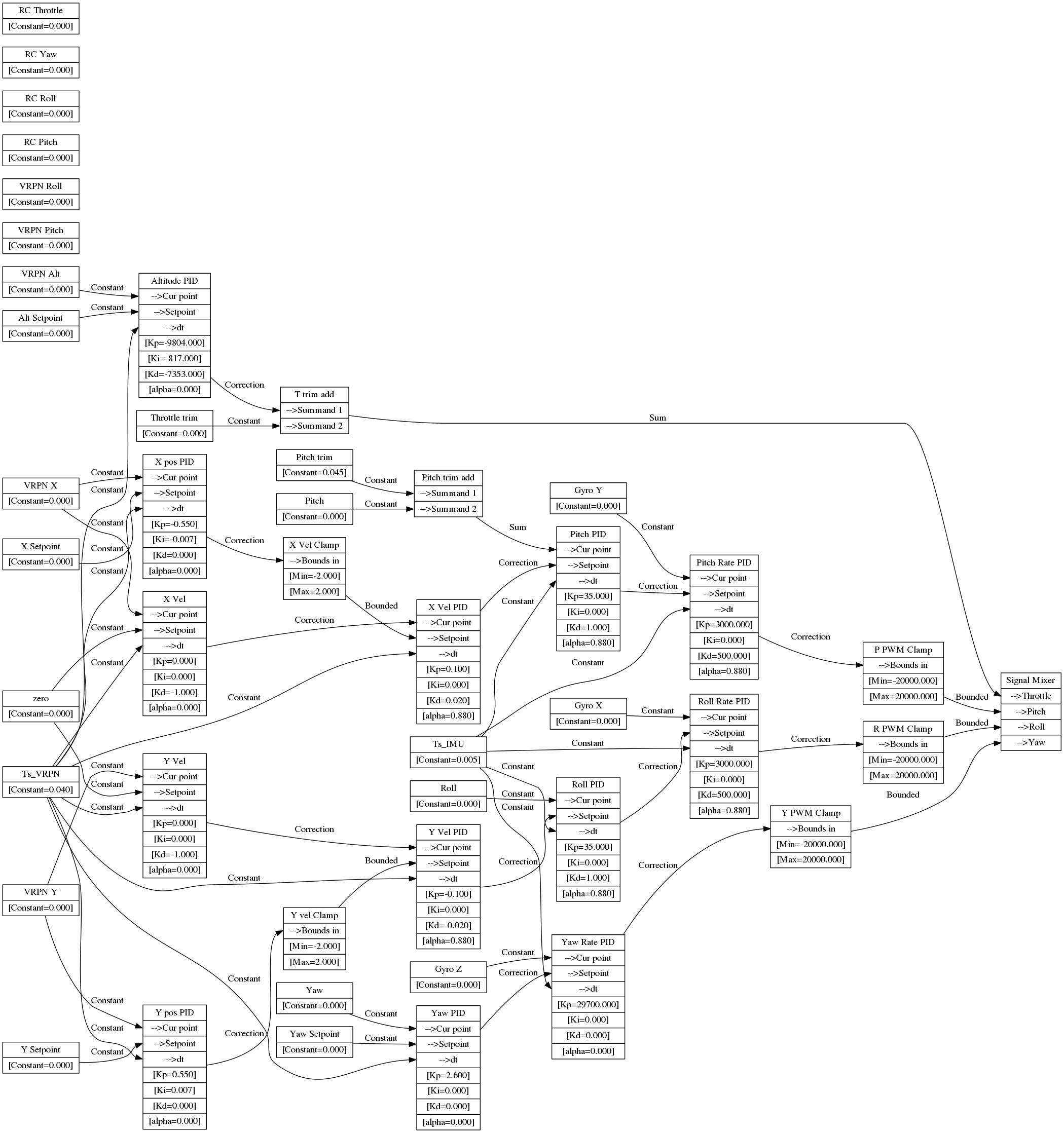
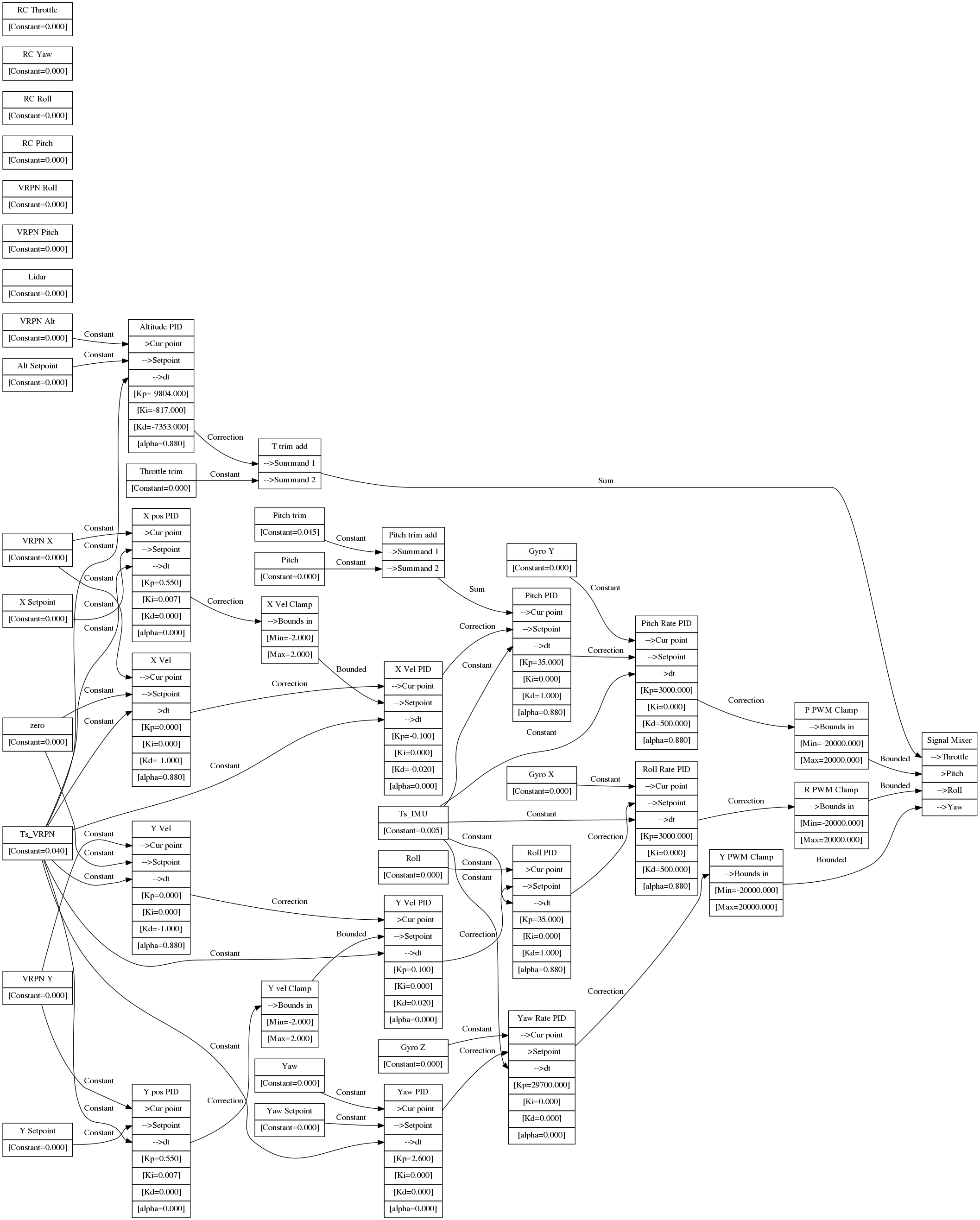
Added define for USE_LIDAR. Lidar is still polled and the node is updated, but it is not used for altitude control by default.
{kind=link}
{kind=link}
| W: | H:
| W: | H:
Added define for USE_LIDAR. Lidar is still polled and the node is updated, but it is not used for altitude control by default.
| W: | H:
| W: | H: