-
- Downloads
Made sampling time in control algorithm dynamic.
Showing
- quad/sw/modular_quad_pid/gen_diagram/Makefile 1 addition, 1 deletionquad/sw/modular_quad_pid/gen_diagram/Makefile
- quad/sw/modular_quad_pid/gen_diagram/create_png.sh 4 additions, 0 deletionsquad/sw/modular_quad_pid/gen_diagram/create_png.sh
- quad/sw/modular_quad_pid/gen_diagram/gen_diagram 0 additions, 0 deletionsquad/sw/modular_quad_pid/gen_diagram/gen_diagram
- quad/sw/modular_quad_pid/gen_diagram/generate.c 1 addition, 0 deletionsquad/sw/modular_quad_pid/gen_diagram/generate.c
- quad/sw/modular_quad_pid/gen_diagram/network.dot 3 additions, 3 deletionsquad/sw/modular_quad_pid/gen_diagram/network.dot
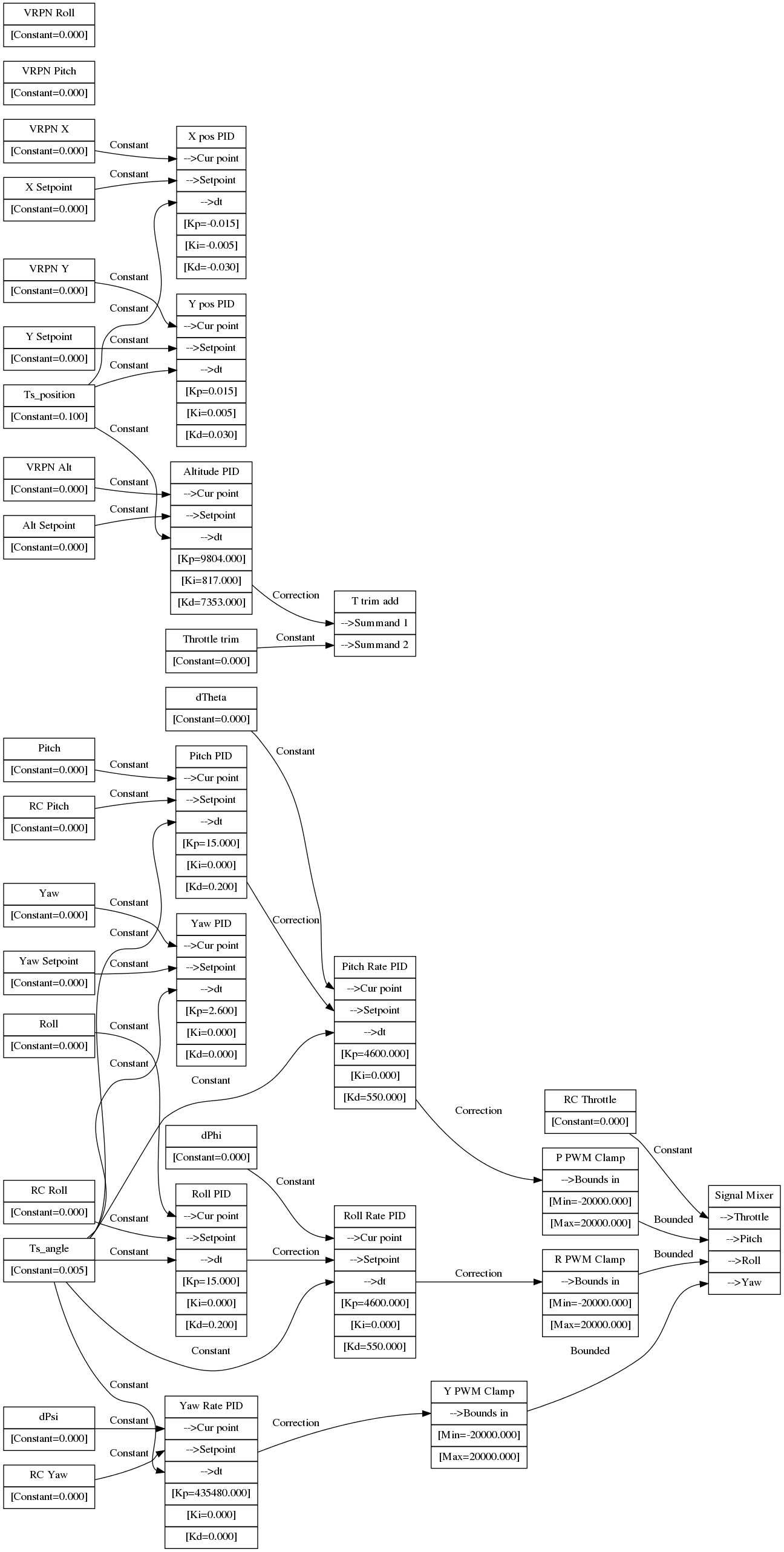
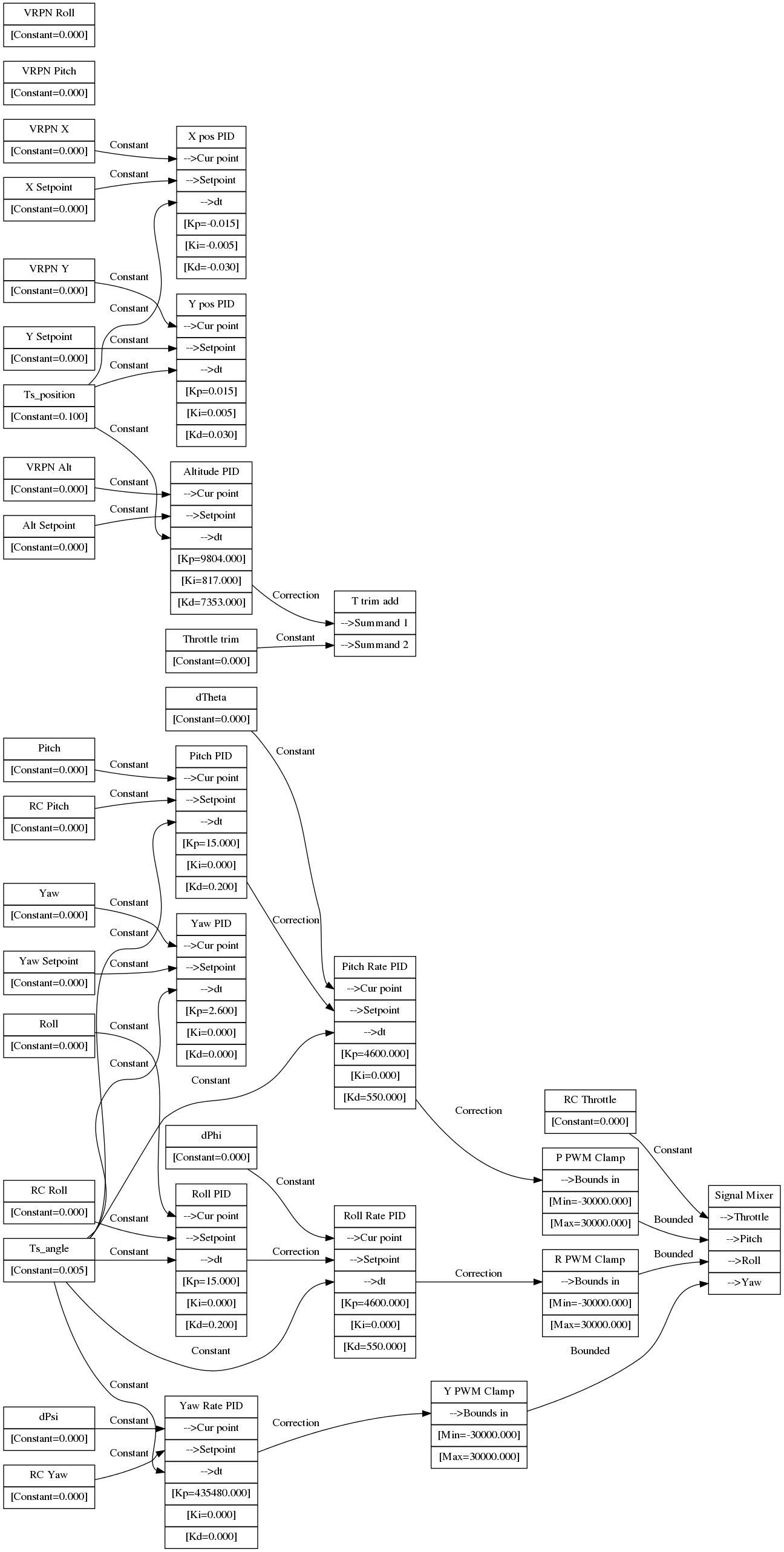
- quad/sw/modular_quad_pid/gen_diagram/network.png 0 additions, 0 deletionsquad/sw/modular_quad_pid/gen_diagram/network.png
- quad/sw/modular_quad_pid/src/control_algorithm.c 20 additions, 12 deletionsquad/sw/modular_quad_pid/src/control_algorithm.c
- quad/sw/modular_quad_pid/src/log_data.c 3 additions, 0 deletionsquad/sw/modular_quad_pid/src/log_data.c
- quad/sw/modular_quad_pid/src/sensor_processing.c 2 additions, 2 deletionsquad/sw/modular_quad_pid/src/sensor_processing.c
- quad/sw/modular_quad_pid/src/timer.c 12 additions, 5 deletionsquad/sw/modular_quad_pid/src/timer.c
- quad/sw/modular_quad_pid/src/timer.h 4 additions, 9 deletionsquad/sw/modular_quad_pid/src/timer.h
No preview for this file type
{kind=link}
{kind=link}
| W: | H:
| W: | H: