Added #defines for using optical flow vs. VRPN and using integrated gyro for...
Added #defines for using optical flow vs. VRPN and using integrated gyro for yaw. Updated Gyro Z bias. Changed some sensor processing regarding optical flow.
Showing
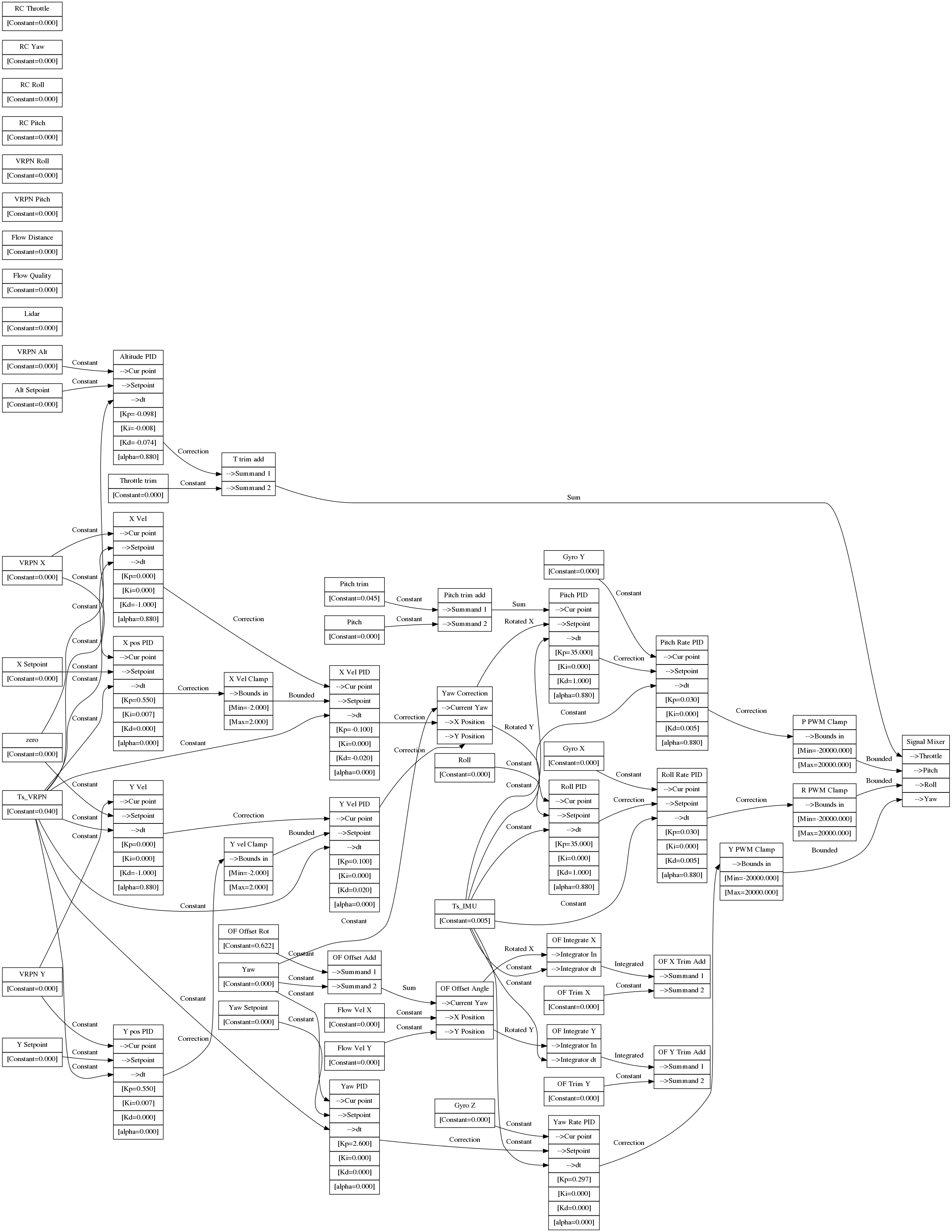
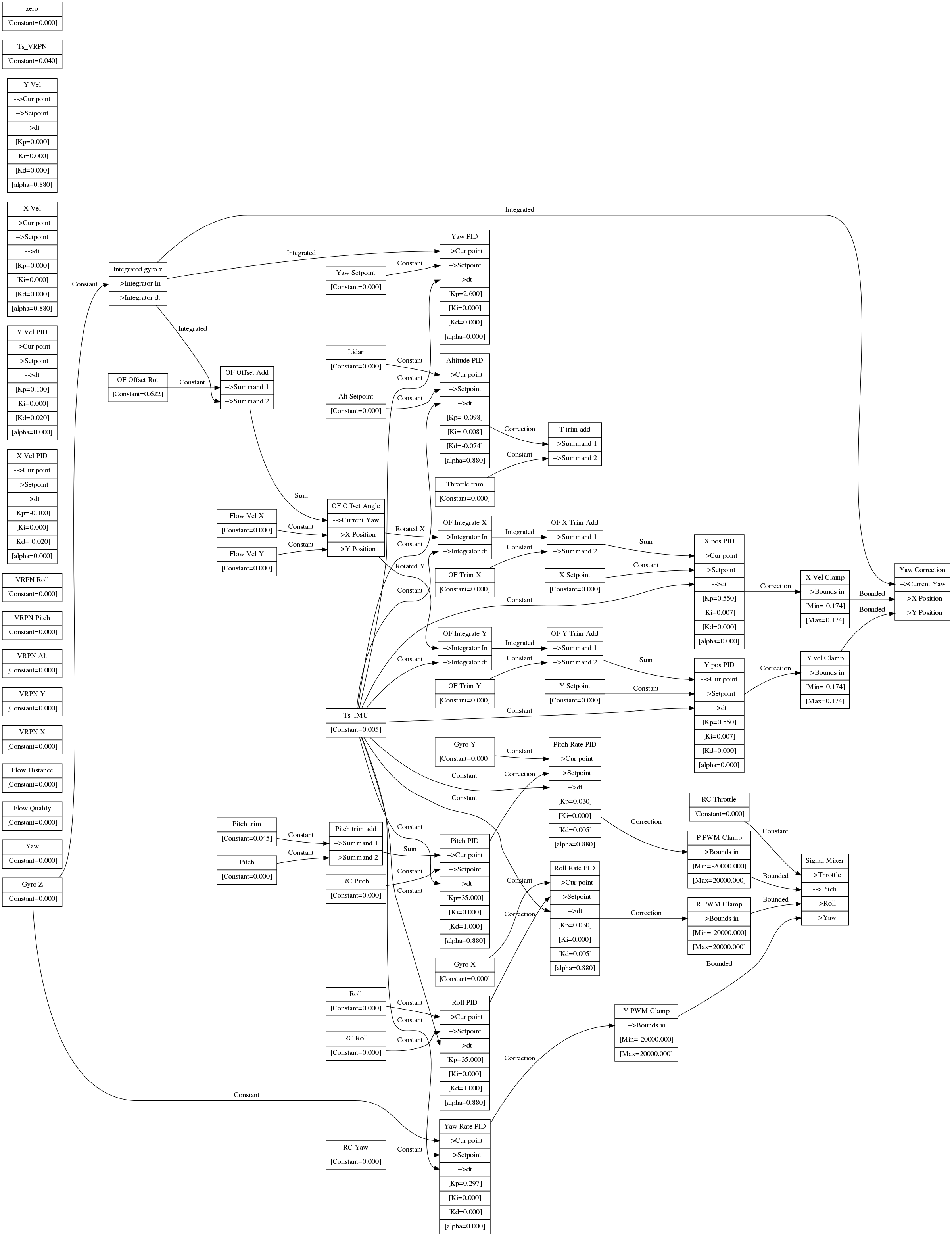
- quad/src/gen_diagram/network.dot 23 additions, 32 deletionsquad/src/gen_diagram/network.dot
- quad/src/gen_diagram/network.png 0 additions, 0 deletionsquad/src/gen_diagram/network.png
- quad/src/quad_app/control_algorithm.c 78 additions, 5 deletionsquad/src/quad_app/control_algorithm.c
- quad/src/quad_app/log_data.c 1 addition, 6 deletionsquad/src/quad_app/log_data.c
- quad/src/quad_app/sensor_processing.c 13 additions, 4 deletionsquad/src/quad_app/sensor_processing.c
- quad/src/quad_app/type_def.h 1 addition, 0 deletionsquad/src/quad_app/type_def.h
- quad/xsdk_workspace/real_quad/src/hw_impl_zybo_imu.c 1 addition, 1 deletionquad/xsdk_workspace/real_quad/src/hw_impl_zybo_imu.c
{kind=link}
{kind=link}
| W: | H:
| W: | H: