Showing
- FlyPi/crazyflie-firmware-2021.06/docs/functional-areas/sensor-to-control/controllers.md 60 additions, 0 deletions...06/docs/functional-areas/sensor-to-control/controllers.md
- FlyPi/crazyflie-firmware-2021.06/docs/functional-areas/sensor-to-control/index.md 102 additions, 0 deletions...-2021.06/docs/functional-areas/sensor-to-control/index.md
- FlyPi/crazyflie-firmware-2021.06/docs/functional-areas/sensor-to-control/state_estimators.md 71 additions, 0 deletions...cs/functional-areas/sensor-to-control/state_estimators.md
- FlyPi/crazyflie-firmware-2021.06/docs/functional-areas/trajectory_formats.md 132 additions, 0 deletions...mware-2021.06/docs/functional-areas/trajectory_formats.md
- FlyPi/crazyflie-firmware-2021.06/docs/images/cascaded_pid_controller.png 0 additions, 0 deletions...-firmware-2021.06/docs/images/cascaded_pid_controller.png
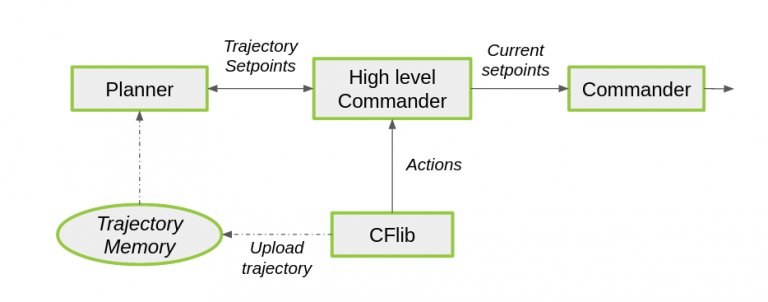
- FlyPi/crazyflie-firmware-2021.06/docs/images/commander_framework.png 0 additions, 0 deletions...flie-firmware-2021.06/docs/images/commander_framework.png
- FlyPi/crazyflie-firmware-2021.06/docs/images/complementary_filter.png 0 additions, 0 deletions...lie-firmware-2021.06/docs/images/complementary_filter.png
- FlyPi/crazyflie-firmware-2021.06/docs/images/controller_overview.png 0 additions, 0 deletions...flie-firmware-2021.06/docs/images/controller_overview.png
- FlyPi/crazyflie-firmware-2021.06/docs/images/crtp_log.png 0 additions, 0 deletionsFlyPi/crazyflie-firmware-2021.06/docs/images/crtp_log.png
- FlyPi/crazyflie-firmware-2021.06/docs/images/crtp_mem.png 0 additions, 0 deletionsFlyPi/crazyflie-firmware-2021.06/docs/images/crtp_mem.png
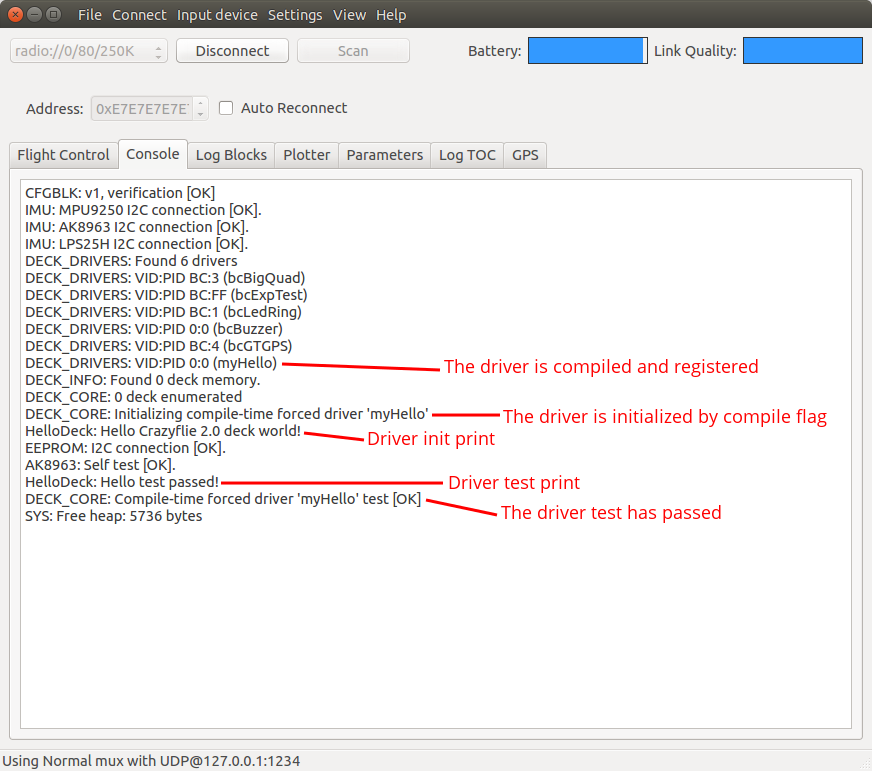
- FlyPi/crazyflie-firmware-2021.06/docs/images/deckhelloconsole.png 0 additions, 0 deletions...azyflie-firmware-2021.06/docs/images/deckhelloconsole.png
- FlyPi/crazyflie-firmware-2021.06/docs/images/extended_kalman_filter.png 0 additions, 0 deletions...e-firmware-2021.06/docs/images/extended_kalman_filter.png
- FlyPi/crazyflie-firmware-2021.06/docs/images/flowdeck_velocity.png 0 additions, 0 deletions...zyflie-firmware-2021.06/docs/images/flowdeck_velocity.png
- FlyPi/crazyflie-firmware-2021.06/docs/images/high_level_commander.png 0 additions, 0 deletions...lie-firmware-2021.06/docs/images/high_level_commander.png
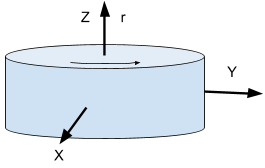
- FlyPi/crazyflie-firmware-2021.06/docs/images/lighthouse/base_station_ref_frame.png 0 additions, 0 deletions...2021.06/docs/images/lighthouse/base_station_ref_frame.png
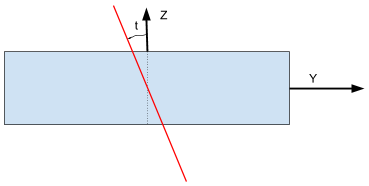
- FlyPi/crazyflie-firmware-2021.06/docs/images/lighthouse/light_plane_tilt.png 0 additions, 0 deletions...mware-2021.06/docs/images/lighthouse/light_plane_tilt.png
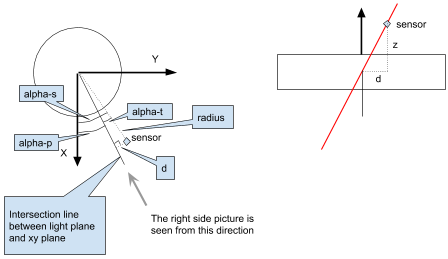
- FlyPi/crazyflie-firmware-2021.06/docs/images/lighthouse/prediction_geometry.png 0 additions, 0 deletions...re-2021.06/docs/images/lighthouse/prediction_geometry.png
- FlyPi/crazyflie-firmware-2021.06/docs/images/lighthouse/rotor_ref_frame.png 0 additions, 0 deletions...rmware-2021.06/docs/images/lighthouse/rotor_ref_frame.png
- FlyPi/crazyflie-firmware-2021.06/docs/images/lighthouse/rotor_rotaion_angle.png 0 additions, 0 deletions...re-2021.06/docs/images/lighthouse/rotor_rotaion_angle.png
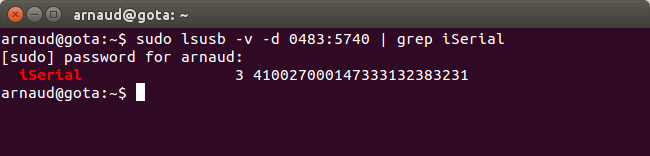
- FlyPi/crazyflie-firmware-2021.06/docs/images/linux_serial.png 0 additions, 0 deletions...i/crazyflie-firmware-2021.06/docs/images/linux_serial.png
Some changes are not shown.
For a faster browsing experience, only 20 of 247+ files are shown.
{kind=link}

95.8 KiB
{kind=link}

125 KiB
{kind=link}

29.2 KiB
{kind=link}

357 KiB
{kind=link}

5.5 KiB
{kind=link}

5.91 KiB
{kind=link}
141 KiB
{kind=link}

57.9 KiB
{kind=link}

121 KiB
{kind=link}
112 KiB
{kind=link}

8.61 KiB
{kind=link}
9.2 KiB
{kind=link}
26.8 KiB
{kind=link}
10.6 KiB
{kind=link}

13.9 KiB
{kind=link}
17.8 KiB