Showing
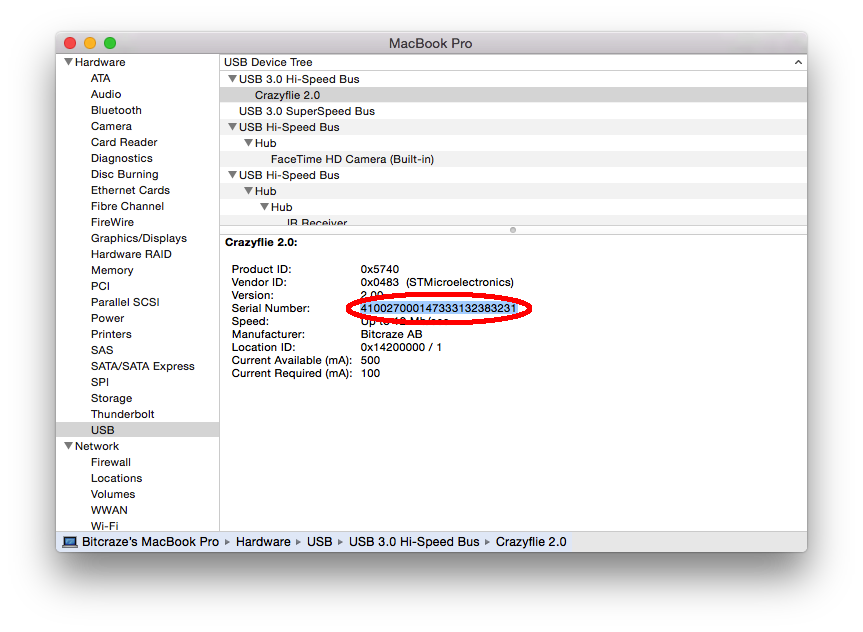
- FlyPi/crazyflie-firmware-2021.06/docs/images/mac_serial.png 0 additions, 0 deletionsFlyPi/crazyflie-firmware-2021.06/docs/images/mac_serial.png
- FlyPi/crazyflie-firmware-2021.06/docs/images/mac_serial_about.png 0 additions, 0 deletions...azyflie-firmware-2021.06/docs/images/mac_serial_about.png
- FlyPi/crazyflie-firmware-2021.06/docs/images/pid.png 0 additions, 0 deletionsFlyPi/crazyflie-firmware-2021.06/docs/images/pid.png
- FlyPi/crazyflie-firmware-2021.06/docs/images/rkf-eq1.png 0 additions, 0 deletionsFlyPi/crazyflie-firmware-2021.06/docs/images/rkf-eq1.png
- FlyPi/crazyflie-firmware-2021.06/docs/images/rkf-eq2.png 0 additions, 0 deletionsFlyPi/crazyflie-firmware-2021.06/docs/images/rkf-eq2.png
- FlyPi/crazyflie-firmware-2021.06/docs/images/rkf-eq3.png 0 additions, 0 deletionsFlyPi/crazyflie-firmware-2021.06/docs/images/rkf-eq3.png
- FlyPi/crazyflie-firmware-2021.06/docs/images/sensor.png 0 additions, 0 deletionsFlyPi/crazyflie-firmware-2021.06/docs/images/sensor.png
- FlyPi/crazyflie-firmware-2021.06/docs/images/sensors_to_motors.png 0 additions, 0 deletions...zyflie-firmware-2021.06/docs/images/sensors_to_motors.png
- FlyPi/crazyflie-firmware-2021.06/docs/images/setpoint_structure.png 0 additions, 0 deletions...yflie-firmware-2021.06/docs/images/setpoint_structure.png
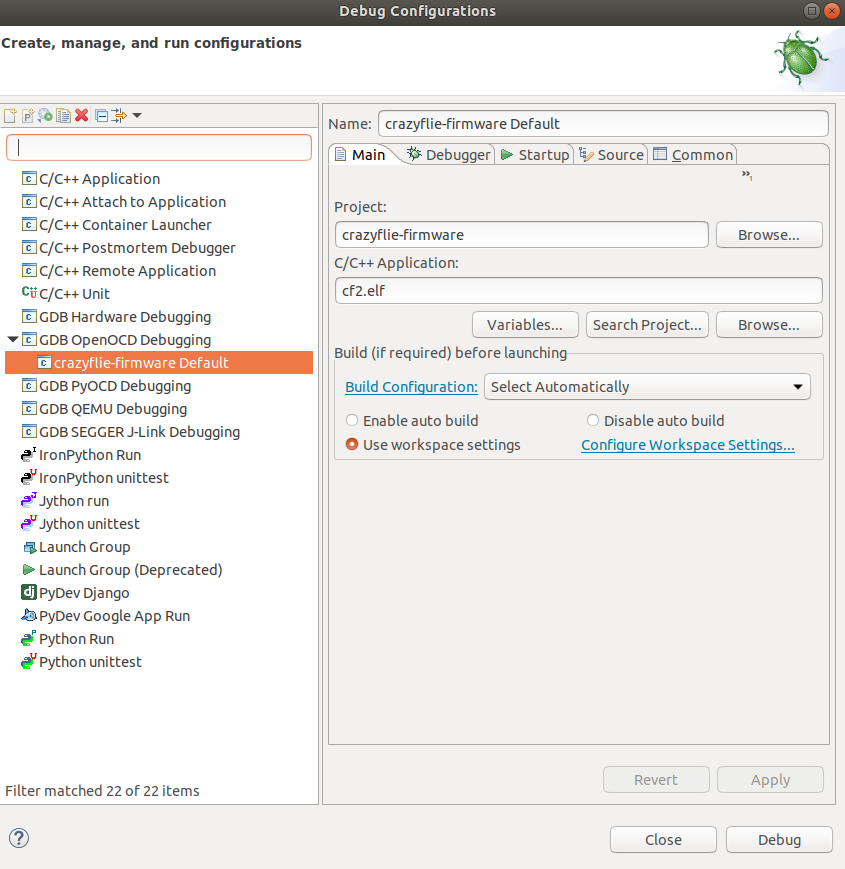
- FlyPi/crazyflie-firmware-2021.06/docs/images/stm_openocd_debugger.png 0 additions, 0 deletions...lie-firmware-2021.06/docs/images/stm_openocd_debugger.png
- FlyPi/crazyflie-firmware-2021.06/docs/images/stm_openocd_main.png 0 additions, 0 deletions...azyflie-firmware-2021.06/docs/images/stm_openocd_main.png
- FlyPi/crazyflie-firmware-2021.06/docs/images/stm_openocd_startup.png 0 additions, 0 deletions...flie-firmware-2021.06/docs/images/stm_openocd_startup.png
- FlyPi/crazyflie-firmware-2021.06/docs/images/vscode_add_configuration.webp 0 additions, 0 deletions...irmware-2021.06/docs/images/vscode_add_configuration.webp
- FlyPi/crazyflie-firmware-2021.06/docs/images/vscode_cortex_debug.webp 0 additions, 0 deletions...lie-firmware-2021.06/docs/images/vscode_cortex_debug.webp
- FlyPi/crazyflie-firmware-2021.06/docs/images/windows_serial.png 0 additions, 0 deletions...crazyflie-firmware-2021.06/docs/images/windows_serial.png
- FlyPi/crazyflie-firmware-2021.06/docs/index.md 21 additions, 0 deletionsFlyPi/crazyflie-firmware-2021.06/docs/index.md
- FlyPi/crazyflie-firmware-2021.06/docs/userguides/app_layer.md 43 additions, 0 deletions...i/crazyflie-firmware-2021.06/docs/userguides/app_layer.md
- FlyPi/crazyflie-firmware-2021.06/docs/userguides/deck.md 112 additions, 0 deletionsFlyPi/crazyflie-firmware-2021.06/docs/userguides/deck.md
- FlyPi/crazyflie-firmware-2021.06/docs/userguides/decks/active-marker-deck.md 46 additions, 0 deletions...mware-2021.06/docs/userguides/decks/active-marker-deck.md
- FlyPi/crazyflie-firmware-2021.06/docs/userguides/decks/buzzer-deck.md 26 additions, 0 deletions...lie-firmware-2021.06/docs/userguides/decks/buzzer-deck.md
Some changes are not shown.
For a faster browsing experience, only 20 of 247+ files are shown.
{kind=link}
117 KiB
{kind=link}

79.9 KiB
{kind=link}

16.2 KiB
{kind=link}

19.7 KiB
{kind=link}

25.1 KiB
{kind=link}

11.6 KiB
{kind=link}

14.7 KiB
{kind=link}

25.9 KiB
{kind=link}

92.3 KiB
{kind=link}

182 KiB
{kind=link}
131 KiB
{kind=link}

170 KiB
{kind=link}

65.3 KiB
{kind=link}

42 KiB
{kind=link}

43.6 KiB