layout: defaultControls
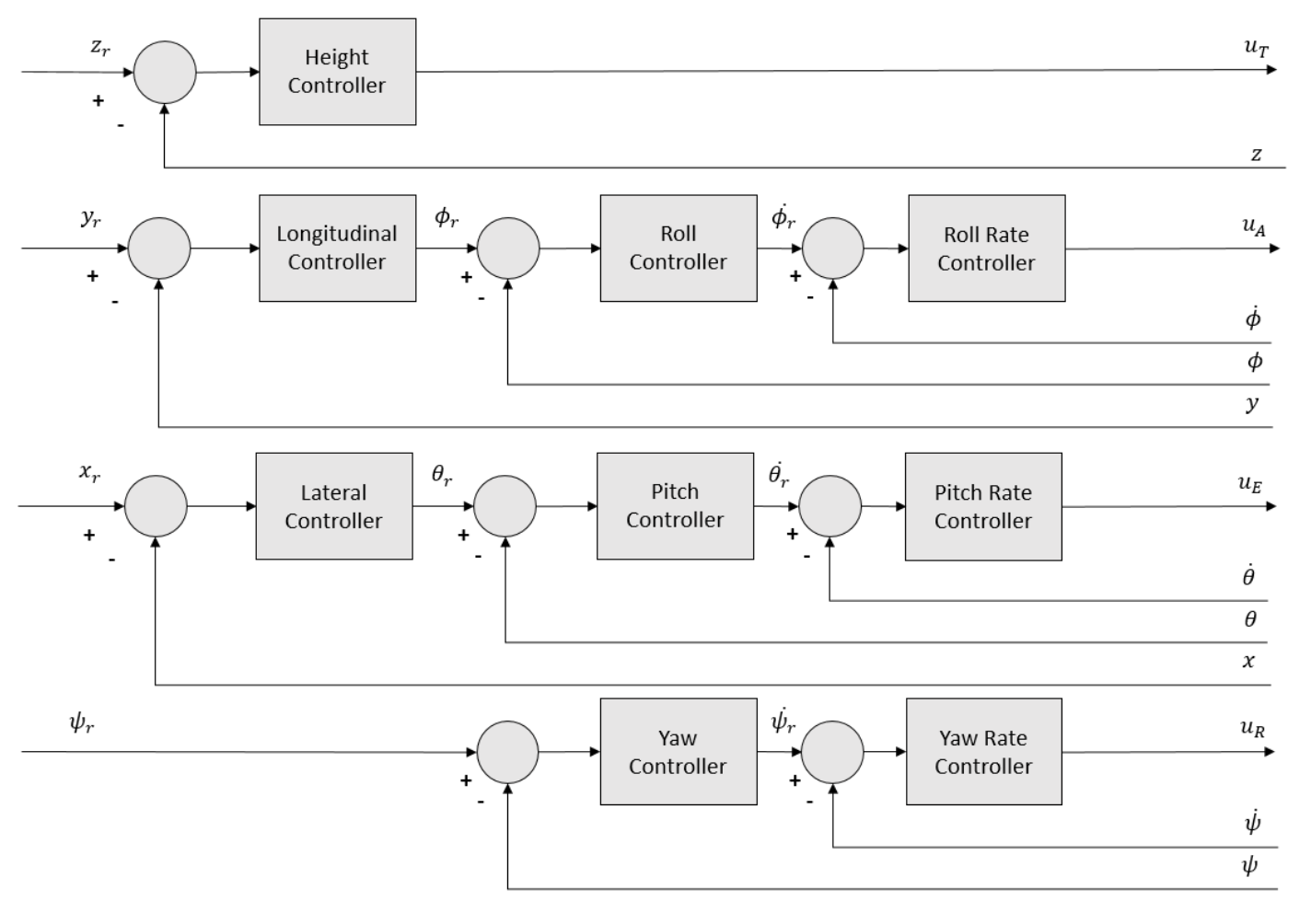
The quadcopter is stabilized with on-board PID controllers. These controllers use pitch, roll, and yaw data from on-board sensors and positional data from the infrared tracking system to determine appropriate actuator signals necessary to keep the quadcopter stable during flight.
The classical PID controller is characterized by 3 coefficients that specify how the controller functions. A PID controller can be configured through iterative determination of the PID coefficients, but we expect to obtain a more accurate control system by first developing a robust mathematical model of the quadcopter system. Once we establish this model, we can use numerical characteristics of the quadcopter to calculate the appropriate PID coefficients for our controllers.
The model we are developing follows the methods developed by our advising graduate student Matt Rich in his thesis Model development, system identification, and control of a quadrotor helicopter.